{kind=link}
{kind=link}
{kind=link}
Project Name : Application of Algorithm to FAST, BRIEF, ORB, SIFT,SURF, And HARRIS for Detector, Descriptor Keypoints in Object Recognition
Detection and feature matching is an important task in many computer vision applications, such as structure-of-motion, image capture, object detection, and many more.
The reason strong for us to do this project is for what algorithm is most suitable for an object detection that is responded to in the camera path and can describe the results of the capture of the resulting object. Some of the algorithms we use include FAST, BRIEF, ORB, SIFT, SURF and HARIS to know the results of detection and decryption of an object. Where from some of these algorithms that us will use in my project on SLAM Visualization. Because in visualization research SLAM will cover "localization, tracking, and mapping". In order to run well then we need to make sure what algorithms are the most suitable to support our research.
install the requirements below
- Python 3**
- Matplotlib==3.0.3
- Numpy==1.16.2
- Opencv-contrib-python==3.4.2.16
- Opencv-python==3.4.2.16
Open terminal or command promt your computer (CMD)
- git clone https://github.com/MoilOrg/Progress-Heru.git
- Go to the folder

- Make virtual environment (so as not disburse your package)

- Install all on the requirement
- Run program writing the command " python 'name program'.py "
if you use editor tools like pycharm, visual studio, sublime text, spyder or sometheng else follow the steps below :
- Open editor tools
- Select folder
- Select file
- Click run program at editor tools
Note : if there is a problem please check the package and adjust it to the requirements
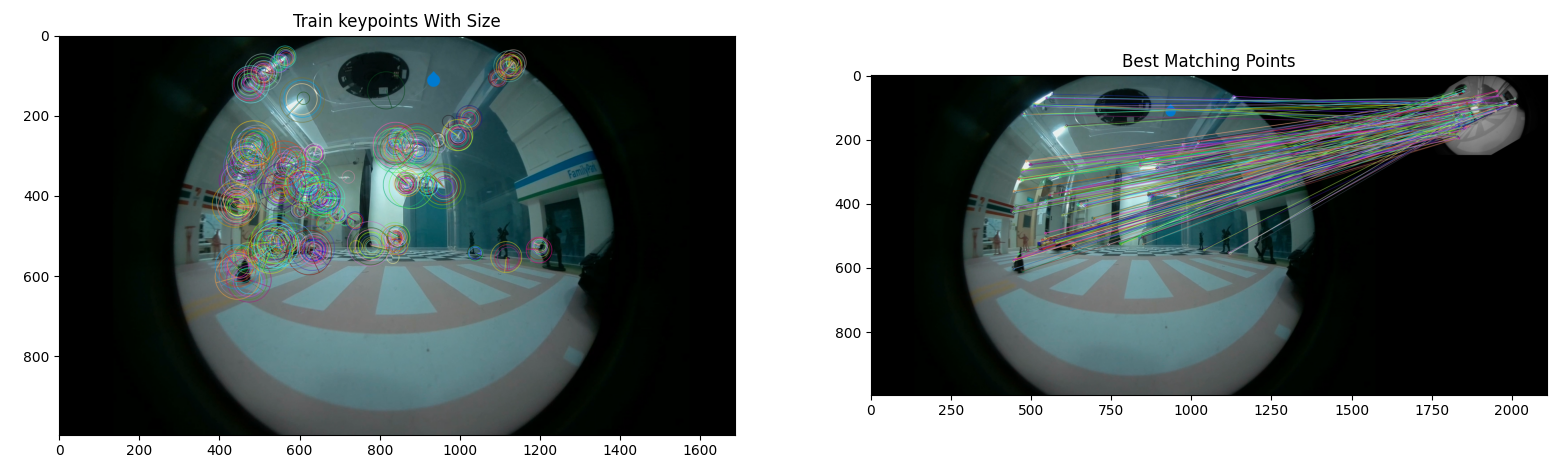
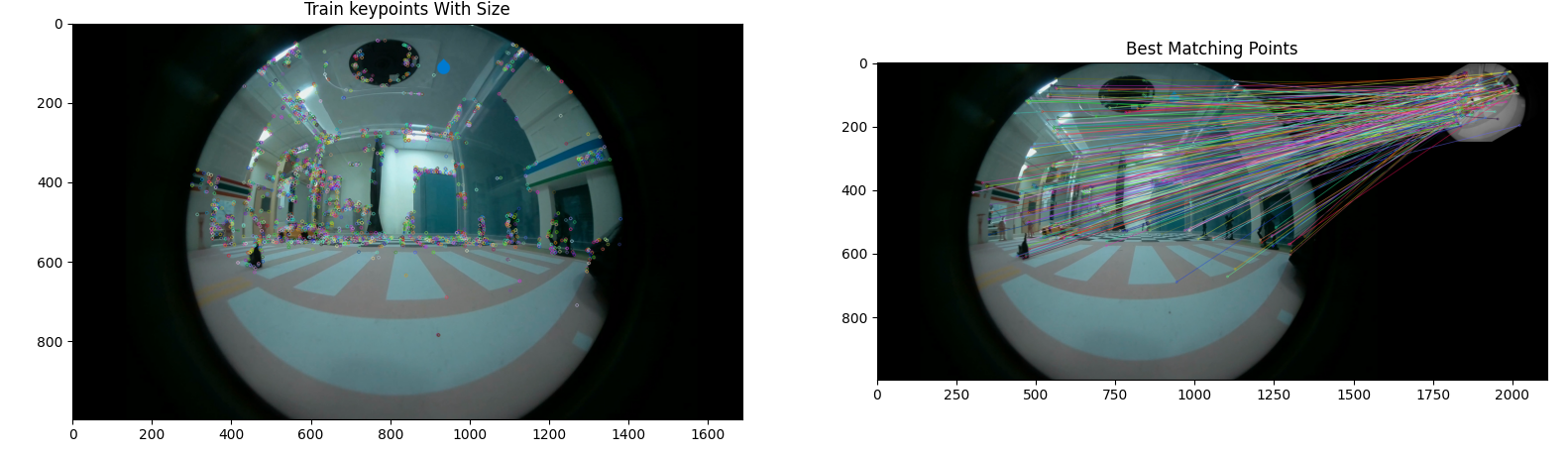
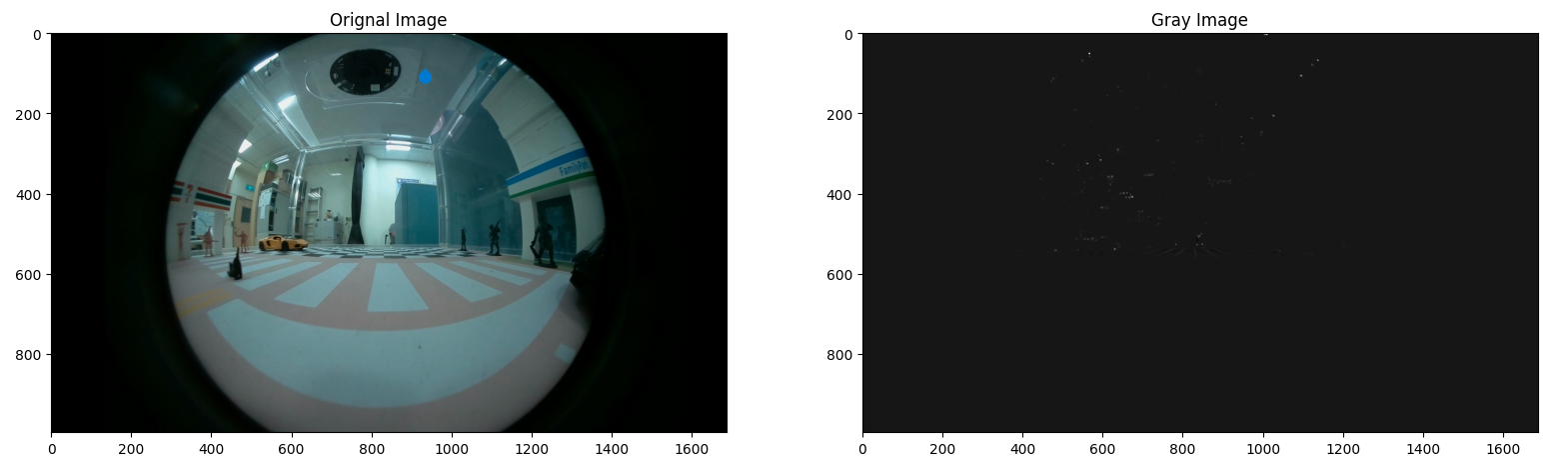
Finally after we tried the algorithm above with an image of the fisheye camera can be seen the results of each algorithm as below.
- Original Image

- Algorithm ORB

- Algorithm FAST


- Algorithm BRIEF

- Algorithm SIFT
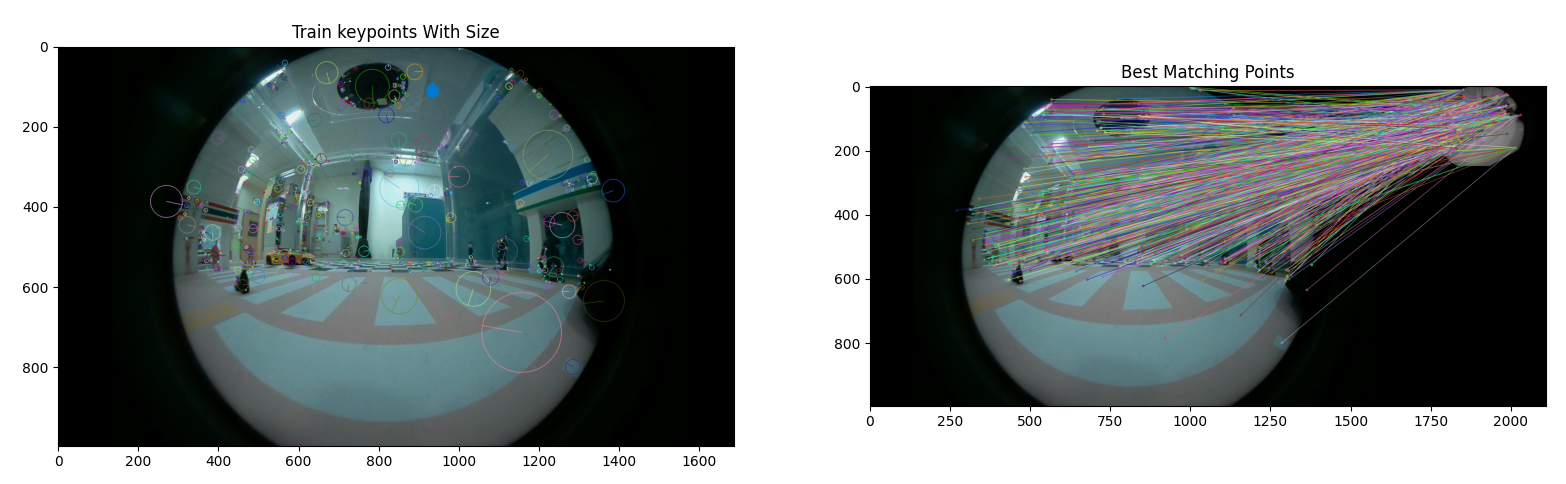

- Algorithm SURF


- Algorithm Harris

- [1]. Ethan Rubiee, Vinchent, Kurt Konolige, Gary Bradsko; “ORB: an efficient alternative to SIFT or SURF” IEEE, 2011 International Conference on Computer Vision.
- [2]. Liang-Chi Chiu, Tian-Sheuan Chang, Jiun-Yesn Chen, Nelson Yen-Chung Chang; “ Fast SIFT Design for Real-Time Visual Feature Extraction” IEEE, 2013 Transaction on Image Processing
- [3]. M.Calonder, V Lepetit, C Strecha, P. Fua; “Brief: Binary robust indepndent elementary features” In European Conference on Computer Vision, 2010.
- [4]. Ebrahim Karami, Siva Prasad, Mohamed Shehata;” Image Matchig Using SIFT, SURF, BRIEF, and ORB: Performance Comparison for Distorted Images” In Proceedings of the 2015 Newfoundland Electrical and Computer Engineering Conference.
- [5]. David G. Lowe; “Object recognition from local scale-invariant features” Proceedings of the Seventh IEEE International Conference on Computer Vision.
- [6]. Krystian Mikolajczyk, Cordelia Schmid; “ Scale & Affine Invariant Interest Point Detectors” International Journal of Computer Vision.
- [7]. Stefan Leutenegger, Margarita Chli, Roland Y, Siegwart; “BRISK: Binary Invariant Scalable Keypoints” IEEE, 2011 International Conference on Computer Vision.
- [8]. https://medium.com/data-breach/introduction-to-orb-oriented-fast-and-rotated-brief-4220e8ec40cf Accessed on [Februari 10, 2021].
- [9]. https://en.wikipedia.org/wiki/Harris_Corner_Detector Acces on [February 26, 2021]