How I made a prototype for a robot that was meant to travel tough terrain and collect rock and gas samples.
The Issue: Scientists need to collect data on volcanos to predict future eruptions and generate predictive models. On top of that volcanos are a time machine into the earth's past, giving scientists a glance back to earth's surface billions of years ago. And to do all that, scientists need boots on the groundto conduct expiriments. Currently there's two options and neither are great. They can either used wheeled-rovers which are basically useless when it comes to crossing deep crevasses or climbing steep terrain or scientists can risk the pits of poisonous gasses and hazardous geography and make the climb themselves.
The solution: Make a new type of rover. One that isn't just able to deal with the hazardous terrain, it thrives in it. Instead of wheels, use pegs that can grapple into the ground. A movement system designed to scour terrain in a way wheels just can't.
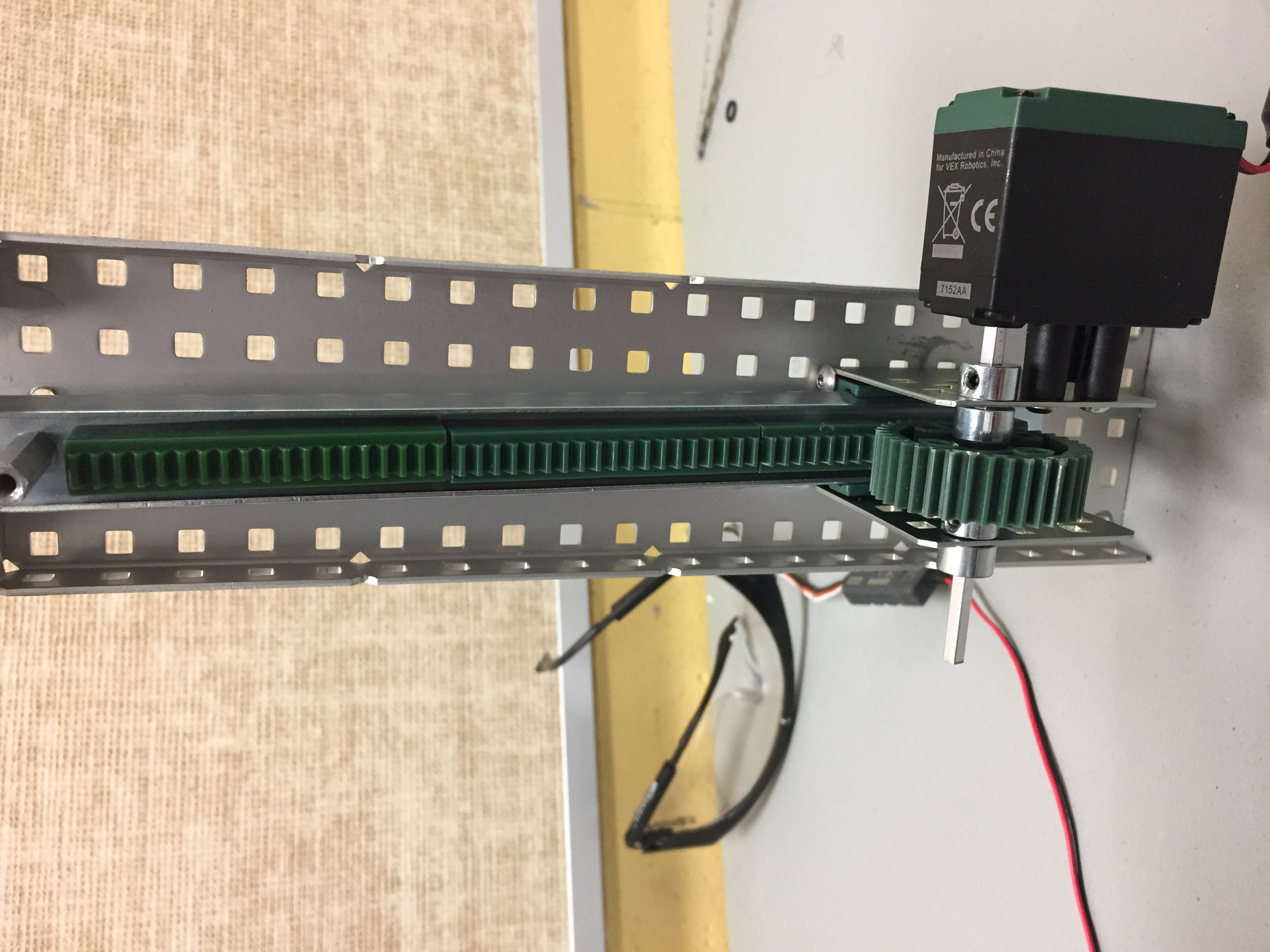
First things first. The pegs. These were build with a rack and pinion system. A pinion is a gear which was connected to a motor and is used to turn this slide back and forth by hooking onto these grooves. These acted as our pegs, digging into the ground and providing traction.
The robot has three sections. The left, middle and right. Each section has 4 pegs.
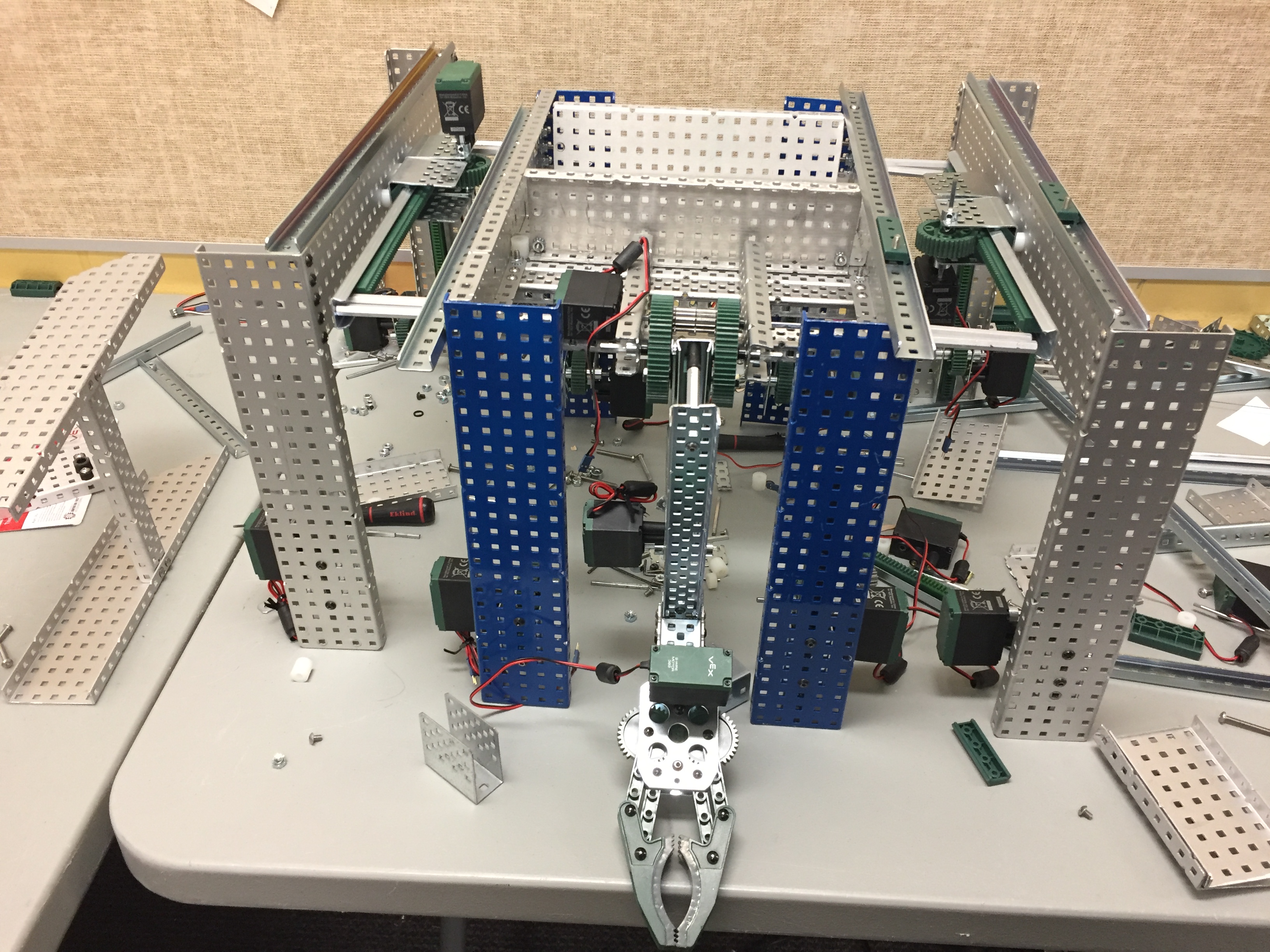
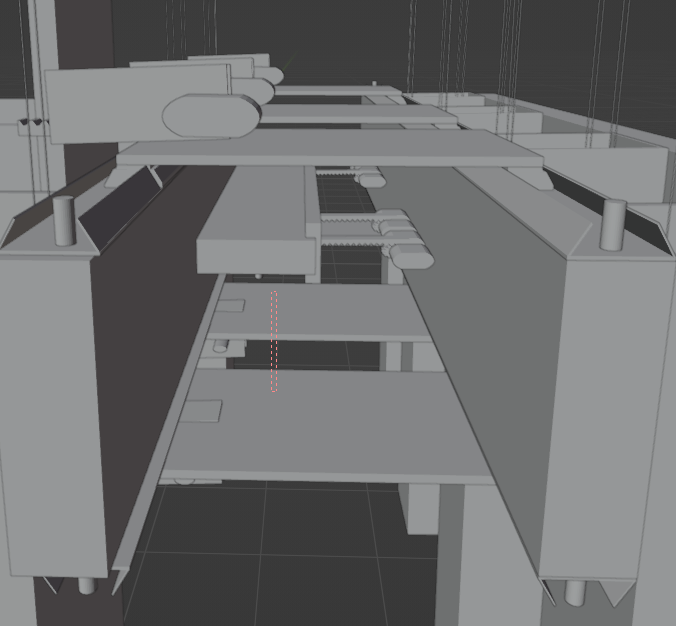
And each section is connected together with 2 horizontal rack and pinion systems. The horizontal rack and pinion system allow the system to move forward. The core mechanism behind the entire thing. The left and right sides dig into the ground with their pegs, then the rack and pinion system move the middle section forward. The middle section digs extends its own pegs, and the pegs from the left and right section are released, and the rack and pinion system moves the left and right section forward, and they extend their pegs, and the middle section releases it pegs. And repeat! Now we have a moving rover.
The peg system allows the robot to cover deep crevasses, the size of which is only limited to the length of the whole rover, instead being limited to just the diameter of it's wheels. Next the peg system digs directly into the ground, allowing the rover to make near vertical climbs.
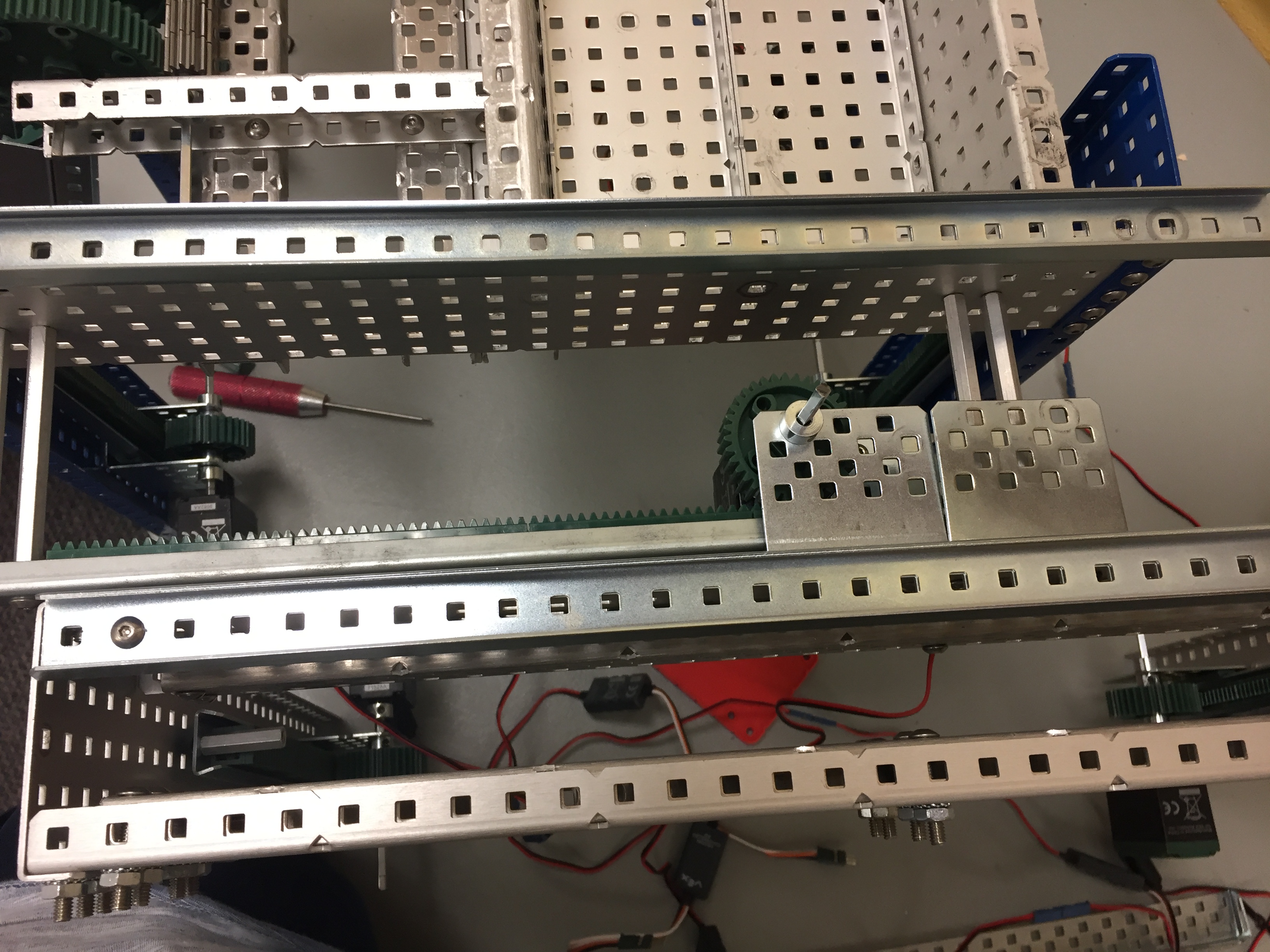
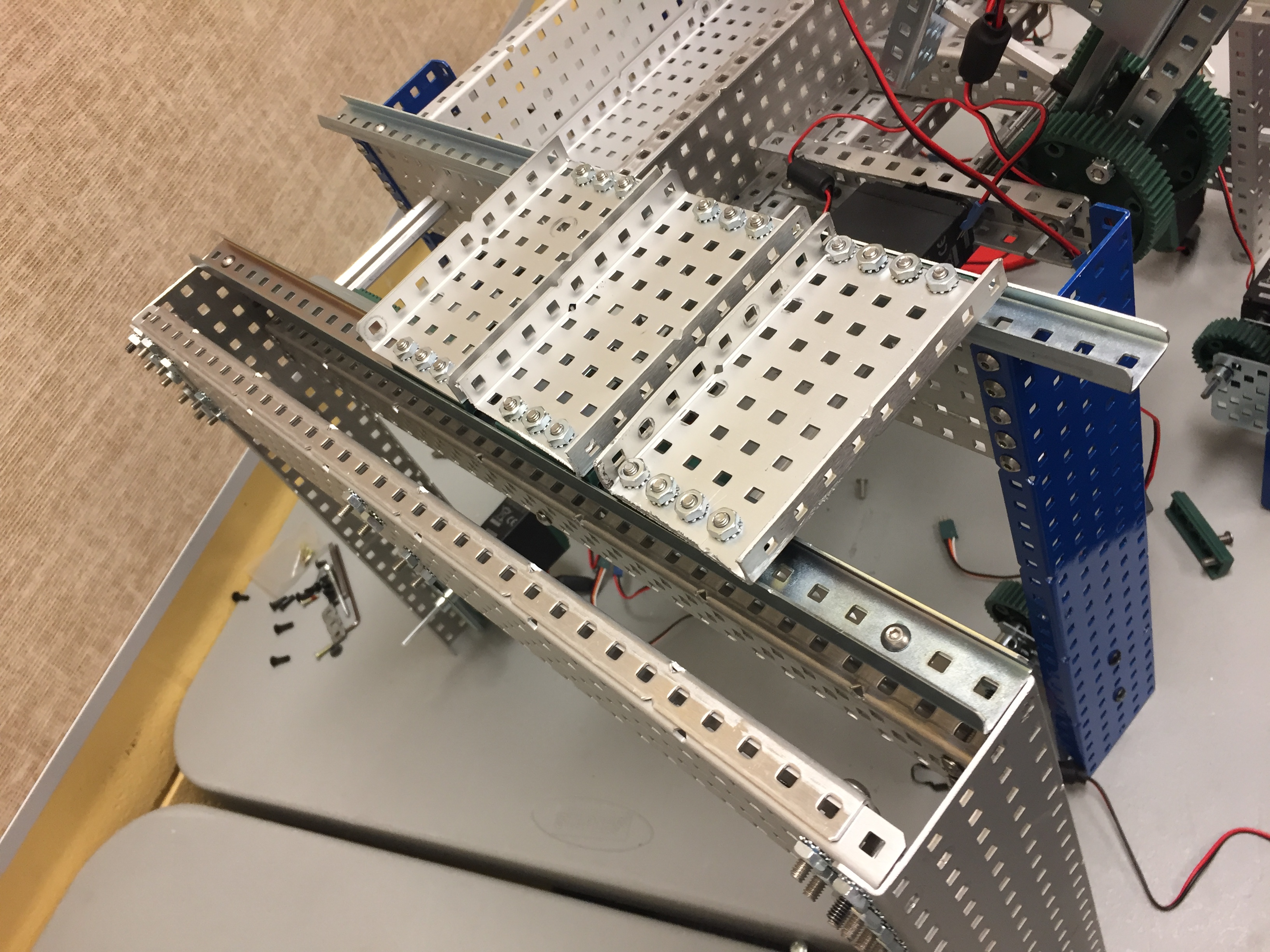
And to provide structural support to the rack and system I designed rails that would go between the sections as well.
Now the collection tool, what's interesting about the tool itself is the extendable length. This allows it's to get samples from inside of ridges and holes, something that no other type of rover can achieve.

The robot itself is outfitted with it's own collection bin for rock and other geological samples.

Now add in C02 sensors, angle sensors, and a whole array of detection devices and you have our VolcanoBot. To get a better understanding check out our VolcanoBot Overview.pdf, or our 3d model which provides an indept view into how we built the robot.