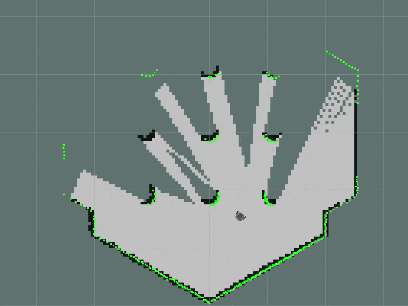
Torhando is an autonomous mobile manipulator robot that is capable of Level 2 Autonomy with an end effector. It's primary hardware consists of Turtlebot 2 and a robotic arm and a gripper. By programming it with ROS and python in Rpi-4, the Bot is capable of visualising the surrounding using the Kinect Cameras' point cloud data and save the maps. The simulations of the bot are obtained in both Gazebo and Blender. With the help of BotFather an Open-Source platform to create custom chat-bots in telegram, we are able to operate the end effector and arm by sending custom messages to the manipulator. Which is a gripper, by sending instructions from a chat-bot that we created replicating the idea of pub-sub. The 'Torhando' is still in it's prototype stage with a lot of room to improve and adapt. As of now, we will be using the existing Turtle Bot along side other attributes to achieve two Important objectives -
The Primary objective is to reach level two autonomy using existing hardware and later develop with the results we gained and improve up to level four autonomy theoretically. The Project TorHando is an Idea to make an Autonomous mobile Robot which has the capabilities of self-navigation and ability to work in an environments where humans interactions are minimal. Our objective is to make sure this project is a start to an ambiguous dream of true automation.