Home
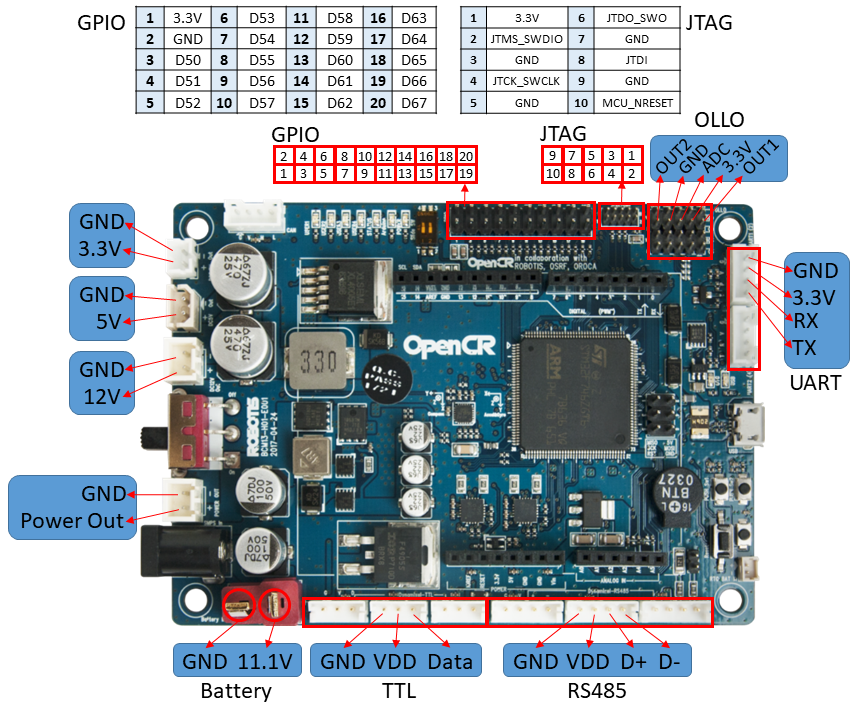
A hexapod spider robot that can be controlled by OpenCR, CM-700, OpenCM, or an Arduino with Robotis Shield. The robot is motorized by eighteen Robotis Dynamixel AX-18A servos, and has one Robotis AX-S1 integrated sensor mounted on a turret that is motorized by two Robotis Dynamixel AX-18A servos The robot frame is a slightly modified TrossenRobotics ABS PhantomX kit.
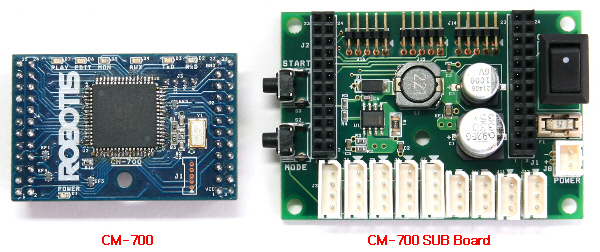
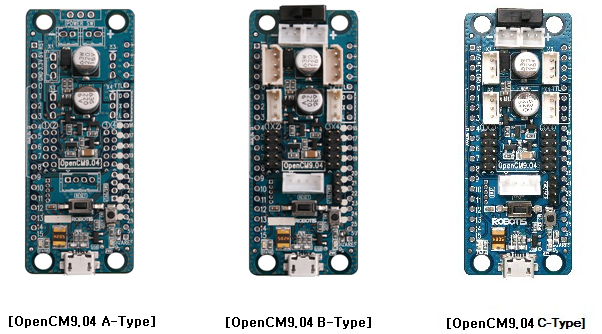
There are many options of robotic controllers in the market and it is a great fun to try it all. Initially I started this spider project using the 1st version of TrossenRobotics Arbotix controller with the open source software from the same company. Then I tried the ROBOTIS OpenCM9.04 open source controller along with its Arduino like IDE. Next, I picked ROBOTIS CM-700 controller along with ROBOTIS RoboPlus Software. and now I'm using Robotis OpenCR1.0 along with Dynamixel Workbench software framework.